
Einführung
Im Beitrag wird die Frage beleuchtet, inwieweit auf der Basis von Windkraft eine verlässliche Versorgung mit Strom hergestellt werden kann. Wir konzentrieren uns dabei auf das grundsätzliche Potential in der Erzeugung von Windstrom und blenden die praktisch bestehenden Limitierungen (minimale Windgeschwindigkeit unterhalb derer kein Strom produziert wird, begrenzter Erntefaktor aufgrund physikalischer Randbedingungen, Abschaltung bei zu starkem Wind, sonstige Verluste) aus.
Zunächst zusammenfassend die verwendeten Begriffe und Definitionen:
(1) 
Die Verteilung der Windgeschwindigkeit
Der Wind gehorcht der Weibullverteilung mit den Parametern  und
und  . Der letztgenannte Wert heißt Formfaktor. Für die vorherrschenden Windverhältnisse in Mitteleuropa kann man den Formfaktor
. Der letztgenannte Wert heißt Formfaktor. Für die vorherrschenden Windverhältnisse in Mitteleuropa kann man den Formfaktor  ansetzen. In Süddeutschland liegt der Wert etwas darunter, an der Küste etwas darüber bei bis zu
ansetzen. In Süddeutschland liegt der Wert etwas darunter, an der Küste etwas darüber bei bis zu  .
.
(2) 
Die Formel gibt die Wahrscheinlichkeit dafür an, dass die tatsächliche Windgeschwindigkeit  zu einem willkürlich gesetzten Zeitpunkt
zu einem willkürlich gesetzten Zeitpunkt  kleiner als die definierte Geschwindigkeit
kleiner als die definierte Geschwindigkeit  ist.
ist.
In Abb. 1 sind typische Graphen für die Verteilung der Windgeschwindigkeit bei unterschiedlichen Formfaktoren dargestellt.

Abbildung 1: Verteilung der Windgeschwindigkeit bei unterschiedlichen Formfaktoren  .
.
Bei gegebenen Parametern bestimmt sich die mittlere Windgeschwindigkeit zu
(3) 
Somit kann man bei bekannter mittlerer Windgeschwindigkeit umgekehrt auch den Parameter errechnen.
(4) 
Die Verteilung der Windleistung
Für ein ideales Windrad ergibt sich die resultierende Windstromleistung  aus der Nennleistung
aus der Nennleistung  und der Nenn-Windgeschwindigkeit
und der Nenn-Windgeschwindigkeit  gemäß
gemäß
(5) 
Demnach lässt sich aus der abgegebenen Leistung umgekehrt die Windgeschwindigkeit bestimmen.
(6) 
Auf dieser Basis können wir nun die Verteilung der Leistungsabgabe folgendermaßen beschreiben:
(7) 
Die produzierte Windstromleistung ist demnach Weibull-verteilt mit dem Formfaktor  . Abbildung 2 zeigt Beispiele für die Verteilung der Leistungsabgabe bei Formfaktoren um .
. Abbildung 2 zeigt Beispiele für die Verteilung der Leistungsabgabe bei Formfaktoren um .

Abbildung 2: Verteilung der Leistungsabgabe bei unterschiedlichen Formfaktoren . Man sieht, dass die Leistung überwiegend bei einem Bruchteil der Normleistung (also der Nennleistung) abgegeben wird.
Generische Darstellung der Leistungsverteilung
Der Erwartungswert der Leistung bestimmt sich zu
(8) 
Für den Formfaktor erhalten wir die Vereinfachung:
(9) 
Wenn  gesetzt wird, dann gibt die obige Formel die Wahrscheinlichkeit des Ereignisses
gesetzt wird, dann gibt die obige Formel die Wahrscheinlichkeit des Ereignisses  wieder. Bei einer Erhöhung der Windstromproduktion um den Faktor
wieder. Bei einer Erhöhung der Windstromproduktion um den Faktor  ist folglich
ist folglich  die Wahrscheinlichkeit, dass weniger Windstrom als
die Wahrscheinlichkeit, dass weniger Windstrom als  produziert wird. Das ist demnach das Ereignis
produziert wird. Das ist demnach das Ereignis  . Eingesetzt in Formel (7) erhalten wir
. Eingesetzt in Formel (7) erhalten wir
(10) 
Im Ergebnis ist daher die Wahrscheinlichkeit des Ereignisses unabhängig von den physikalischen Randbedingungen wie z.B. der mittleren Windgeschwindigkeit und der Nennleistung des Windrads. Allein entscheidend ist das Verhältnis zwischen der produzierten Windleistung und dem Strombedarf, also dem Produktionsfaktor .
Für den Formfaktor  folgt der unmittelbar auswertbare Zusammenhang:
folgt der unmittelbar auswertbare Zusammenhang:
(11) 
Analyse zum Versorgungsgrad
Der Versorgungsgrad  ist das Verhältnis zwischen dem auf einen Zeitpunkt bezogenen Leistungsangebot und dem entsprechenden Leistungsbedarf. Formal also
ist das Verhältnis zwischen dem auf einen Zeitpunkt bezogenen Leistungsangebot und dem entsprechenden Leistungsbedarf. Formal also  . Wenn nun, wie oben, die Windstromproduktion um den Faktor erhöht und
. Wenn nun, wie oben, die Windstromproduktion um den Faktor erhöht und  gesetzt wird, dann ist das Ereignis
gesetzt wird, dann ist das Ereignis  identisch mit . Daher erhalten wir die von der Windgeschwindigkeit und der induzierten Windleistung formal unabhängige Darstellung des Versorgungsgrads in Termen des Produktionsfaktors .
identisch mit . Daher erhalten wir die von der Windgeschwindigkeit und der induzierten Windleistung formal unabhängige Darstellung des Versorgungsgrads in Termen des Produktionsfaktors .
(12) 
bzw.
(13) 
Bezogen auf einen vorgegebenen Versorgungsgrad  statt 1 ergibt sich
statt 1 ergibt sich
(14) 
bzw.
(15) 
Wir haben nun einen vollständigen Überblick über die erzielbaren Versorgungsgrade in Abhängigkeit von der Windstromproduktion in Einheiten des Strombedarfs. Wir müssen also nicht konkrete Windgeschwindigkeiten oder Leistungsfaktoren betrachten und können demgemäß grundsätzliche Aussagen zur Versorgungssicherheit bzw. zum Versorgungsrisiko ohne nähere Kenntnis der Gegebenheiten am Aufstellungsort treffen. Wir müssen lediglich die Verteilung der Windgeschwindigkeiten kennen, genauer, den Formfaktor der entsprechenden Weibullverteilung.
Versorgungssicherheit und Versorgungsrisiko
Die resultierenden graphischen Verläufe für die Versorgungssicherheit  und das Versorgungsrisiko
und das Versorgungsrisiko  bei unterschiedlichen Formfaktoren sind in den Abbildungen 3 und 4 dargestellt.
bei unterschiedlichen Formfaktoren sind in den Abbildungen 3 und 4 dargestellt.

Abbildung 3: Versorgungsrisiko bei unterschiedlichen Formfaktoren .

Abbildung 4: Versorgungssicherheit bei unterschiedlichen Formfaktoren .
Die tatsächliche Windverteilung in Deutschland gehorcht näherungsweise der Weibullverteilung mit dem Formfaktor . Für die grundsätzlichen Aussagen reicht es daher aus, diesen Formfaktor zu betrachten.
Nach Formel (13) bestimmt sich das Versorgungsrisiko zu
(16) 
und entsprechend die Versorgungssicherheit
(17) 

Abbildung 5: Versorgungsrisiko bei einem Formfaktor von .

Abbildung 6: Versorgungssicherheit bei einem Formfaktor von .
Die Graphen in Abb. 5 und Abb. 6 zeigen das theoretische Versorgungsrisiko und entsprechend die Versorgungssicherheit aus der Produktion von Windstrom unter idealen Bedingungen (verlustfrei, 100-prozentige Verfügbarkeit, keine Abschaltung) als Wahrscheinlichkeitsverteilung. Auf der x-Achse ist der Umfang der Windstromproduktion in Vielfachen des Strombedarfs (Produktionsfaktor q) aufgetragen. Die y-Achse in Abb. 5 zeigt das theoretische Versorgungsrisiko und die y-Achse in Abb. 6 die resultierende Versorgungssicherheit als Funktion des Produktionsfaktors q.
Aufgrund der Herleitung erkennen wir, dass die theoretische Versorgungssicherheit und entsprechend auch das Versorgungsrisiko unmittelbar aus dem Verhältnis zwischen der Gesamtproduktion an Windstrom und dem jeweiligen Bedarf, also dem Produktionsfaktor q abgeleitet werden kann.
Einige Zahlenbeispiele: Wenn der Produktionsfaktor  ist (also genauso viel Strom produziert wird, wie im Mittel benötigt wird), dann liegt die Versorgungssicherheit bei 0,3 (= 30 %) und das Versorgungsrisiko bei 0,7 (= 70 %). Vielfach wird diese Situation bereits als „Autarkie“ bezeichnet, obwohl es eigentlich nur „bilanzielle Autarkie“ ist und man tatsächlich in den überwiegenden Zeitabschnitten eines Jahres auf externe Stromlieferungen angewiesen ist.
ist (also genauso viel Strom produziert wird, wie im Mittel benötigt wird), dann liegt die Versorgungssicherheit bei 0,3 (= 30 %) und das Versorgungsrisiko bei 0,7 (= 70 %). Vielfach wird diese Situation bereits als „Autarkie“ bezeichnet, obwohl es eigentlich nur „bilanzielle Autarkie“ ist und man tatsächlich in den überwiegenden Zeitabschnitten eines Jahres auf externe Stromlieferungen angewiesen ist.
Sofern der Produktionsfaktor nur bei  liegt, dann erhalten wir eine Versorgungssicherheit von 0,15 (= 15 %) und ein Versorgungsrisiko von 0,85 (= 85 %). Wenn im Jahresverlauf summarisch doppelt so viel Strom als benötigt produziert (Produktionsfaktor
liegt, dann erhalten wir eine Versorgungssicherheit von 0,15 (= 15 %) und ein Versorgungsrisiko von 0,85 (= 85 %). Wenn im Jahresverlauf summarisch doppelt so viel Strom als benötigt produziert (Produktionsfaktor  ), so ergibt sich eine theoretische Versorgungssicherheit von 0,47 (= 47 %) und ein Versorgungsrisiko von 0,53 (= 53 %) .
), so ergibt sich eine theoretische Versorgungssicherheit von 0,47 (= 47 %) und ein Versorgungsrisiko von 0,53 (= 53 %) .
Man entnimmt den Graphen, dass die theoretische Versorgungssicherheit mit wachsendem Produktionsfaktor zunächst schnell steigt und das Versorgungsrisiko entsprechend sinkt. Allerdings ist der Aufwand für eine deutliche Reduzierung des Versorgungsrisikos am Ende doch sehr hoch: Selbst bei einem Produktionsfaktor von  liegt das Versorgungsrisiko immer noch bei 0,23 (= 23 %), also Versorgungssicherheit 0,77 (= 77 %). Und sogar bei
liegt das Versorgungsrisiko immer noch bei 0,23 (= 23 %), also Versorgungssicherheit 0,77 (= 77 %). Und sogar bei  , wenn also der in der Jahressumme benötigte Windstrom den Bedarf um den Faktor 100 übersteigt – was ja in der Praxis überhaupt nicht finanzierbar ist – bleibt das Versorgungsrisiko bei 0,055 (= 5,5 %). Wir erhalten also lediglich eine Versorgungssicherheit 0,955 (= 95,5 %). Trotz des utopisch hohen Aufwandes wäre zeitanteilig an 16 Tagen eines Jahres die Stromversorgung nicht gewährleistet.
, wenn also der in der Jahressumme benötigte Windstrom den Bedarf um den Faktor 100 übersteigt – was ja in der Praxis überhaupt nicht finanzierbar ist – bleibt das Versorgungsrisiko bei 0,055 (= 5,5 %). Wir erhalten also lediglich eine Versorgungssicherheit 0,955 (= 95,5 %). Trotz des utopisch hohen Aufwandes wäre zeitanteilig an 16 Tagen eines Jahres die Stromversorgung nicht gewährleistet.
Investitionseffizienz
Es ist unmittelbar einleuchtend, dass sich die Investitionskosten proportional mit dem Produktionsfaktor erhöhen oder erniedrigen. Das Verhältnis zwischen der erreichten Versorgungssicherheit  und dem Produktionsfaktor ist daher ein Maß für die Investitionseffizienz.
und dem Produktionsfaktor ist daher ein Maß für die Investitionseffizienz.
Nun kann man fragen, bei welchem Produktionsfaktor und welcher Versorgungssicherheit der Quotient aus beiden Werten sein Maximum annimmt und damit zur größtmöglichen Investitionseffizienz führt?
In Abbildung 7 sind die Verläufe des Quotienten Versorgungssicherheit / Produktionsfaktor für die Formfaktoren dargestellt.

Abbildung 7: Quotient Versorgungssicherheit / Produktionsfaktor für die Formfaktoren . Beispiel: Für den Formfaktor erhalten wir bei  einen Quotienten von
einen Quotienten von  und somit eine Versorgungssicherheit von
und somit eine Versorgungssicherheit von  . Wenn nun der Produktionsfaktor auf
. Wenn nun der Produktionsfaktor auf  erhöht wird, ist der Quotient
erhöht wird, ist der Quotient  und die Versorgungssicherheit
und die Versorgungssicherheit  , d.h., die Versorgungssicherheit steigt überproportional mit dem Produktionsfaktor.
, d.h., die Versorgungssicherheit steigt überproportional mit dem Produktionsfaktor.
Der Quotient Versorgungssicherheit / Produktionsfaktor erreicht an einem bestimmten Wert  für den Produktionsfaktor sein Maximum. Diesen Wert bestimmt man zu
für den Produktionsfaktor sein Maximum. Diesen Wert bestimmt man zu
(18) 
Für die Herleitung s. Versorgungssicherheit mit Windstrom – eine theoretische Analyse | sumymus.
Im Falle des Formfaktors  bekommen wir z.B.
bekommen wir z.B.
(19) 
Aus dem Vorstehenden entnimmt man, dass die Investitionseffizienz zunächst einmal ansteigt und dann nach Erreichen eines Maximums – in Abhängigkeit vom Formfaktor – wieder abfällt. Für  werden die jeweiligen Maxima mit Effizienzwerten von
werden die jeweiligen Maxima mit Effizienzwerten von  bei Produktionsfaktoren
bei Produktionsfaktoren  erreicht. Bei größeren Produktionsfaktoren ist die Investitionseffizienz in jedem Falle geringer.
erreicht. Bei größeren Produktionsfaktoren ist die Investitionseffizienz in jedem Falle geringer.
Man erhält daher bei Erhöhung des Produktionsfaktors in der Relation einen immer geringeren Zuwachs an Versorgungssicherheit. Bei sind das z.B. die Produktionsfaktoren  (s. Abb. 7, rechts des Maximums der blauen Kurve). Bei ausschließlicher Betrachtung der Windstromproduktion und ohne die Berücksichtigung von (teuren) Speichern ist daher der Ausbau der Windkraft wesentlich über die Grenze hinaus zumindest ineffizient.
(s. Abb. 7, rechts des Maximums der blauen Kurve). Bei ausschließlicher Betrachtung der Windstromproduktion und ohne die Berücksichtigung von (teuren) Speichern ist daher der Ausbau der Windkraft wesentlich über die Grenze hinaus zumindest ineffizient.
Realitätsbezug
Natürlich wird man in der Praxis nicht ausschließlich auf die Stromversorgung mit Windkraft bauen und daneben auch andere Erneuerbare wie z.B. Solarstrom oder Biomasse miteinbeziehen. Ist dann die obige Überlegung obsolet und die Versorgungssicherheit in Summe doch zu gewährleisten? Leider nein! Es bleibt die grundsätzliche Problematik der Wetterabhängigkeit. Wenn wir z.B. annehmen, dass 50 % des Bedarfs aus sicheren Quellen kommen (was dann allerdings Photovoltaik ausschließen würde) und damit nur die restlichen 50 % über die Windkraft erzeugt werden müssen, dann laufen wir am Ende auf dieselbe Problematik zu, nur eben mit einem graduell etwas reduziertem Risiko. Statt eines Versorgungsrisikos von 60 % hätte man dann z.B. „nur“ ein Risiko von 30 %. Die erforderliche Versorgungssicherheit von 99,9 % und höher ist auf diesem Wege – also ohne Importe, Speicher oder Backup-Kraftwerke – nicht erreichbar.

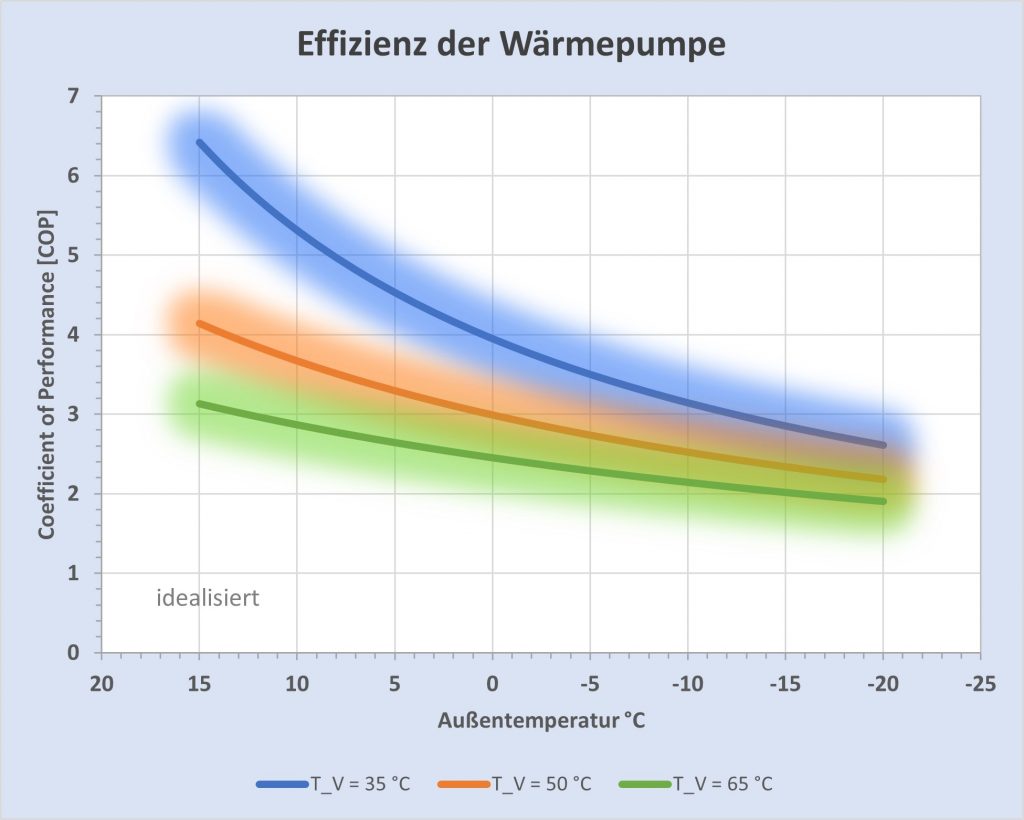
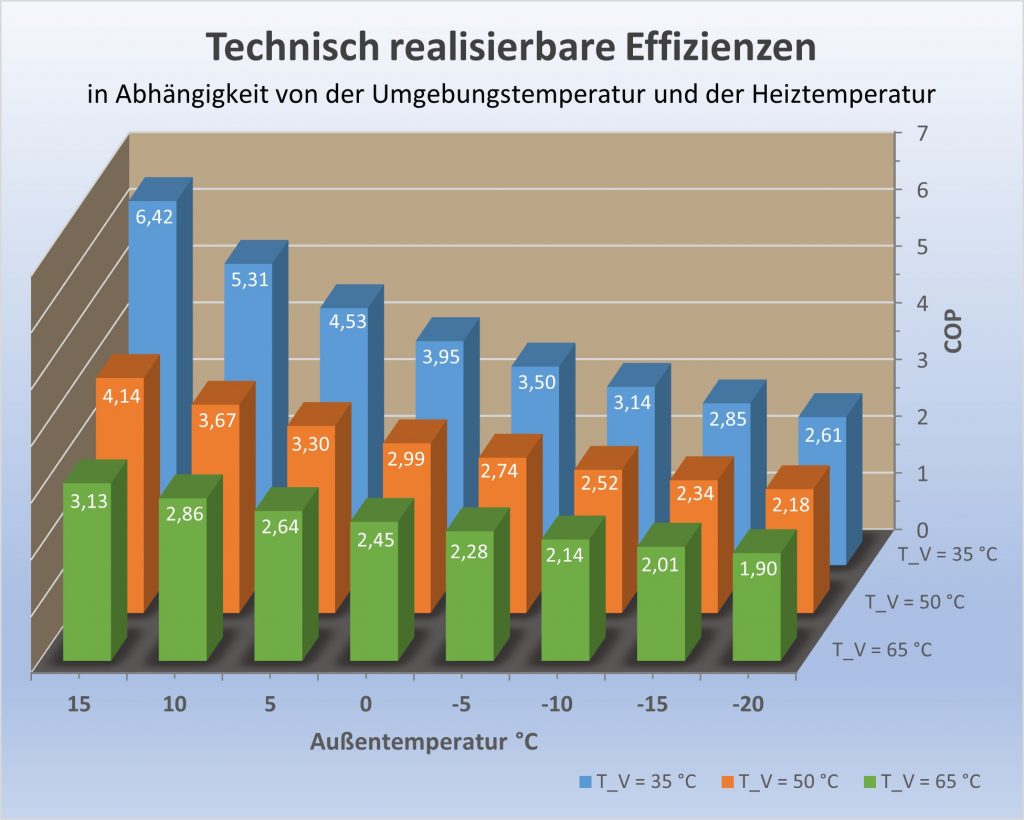
 die Temperatur im Heizkreis (Vorlauftemperatur) und
die Temperatur im Heizkreis (Vorlauftemperatur) und  die Umwelttemperatur. Man sieht hier unmittelbar: Je kleiner die Temperaturdifferenz zwischen Heizkreis und Umwelt, desto größer der Effizienzfaktor. Die Temperaturen sind hierbei in Kelvin anzugeben.
die Umwelttemperatur. Man sieht hier unmittelbar: Je kleiner die Temperaturdifferenz zwischen Heizkreis und Umwelt, desto größer der Effizienzfaktor. Die Temperaturen sind hierbei in Kelvin anzugeben.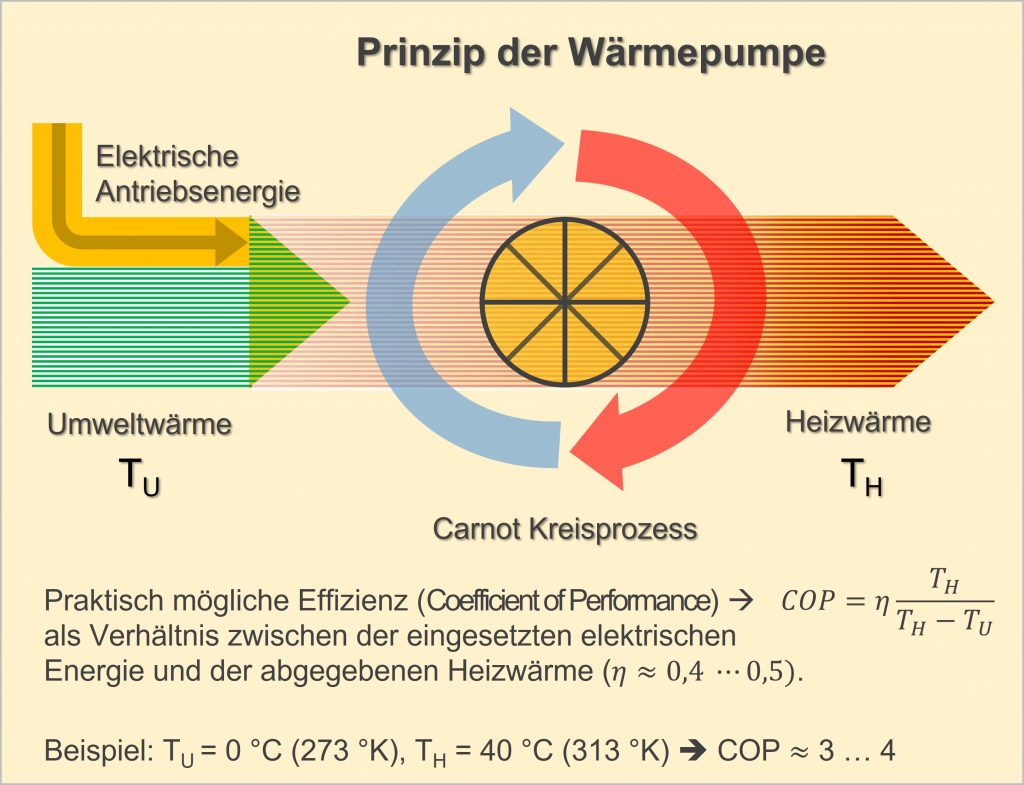

 .
.

 und es gibt einen Konfigurationsparameter
und es gibt einen Konfigurationsparameter  . Der Algorithmus
. Der Algorithmus  bestimmt nach Maßgabe des Konfigurationsparameters
bestimmt nach Maßgabe des Konfigurationsparameters  , formal
, formal  . Bei einem lernenden Algorithmus ist das nicht anders, nur dass eben hier der Parameter
. Bei einem lernenden Algorithmus ist das nicht anders, nur dass eben hier der Parameter 